
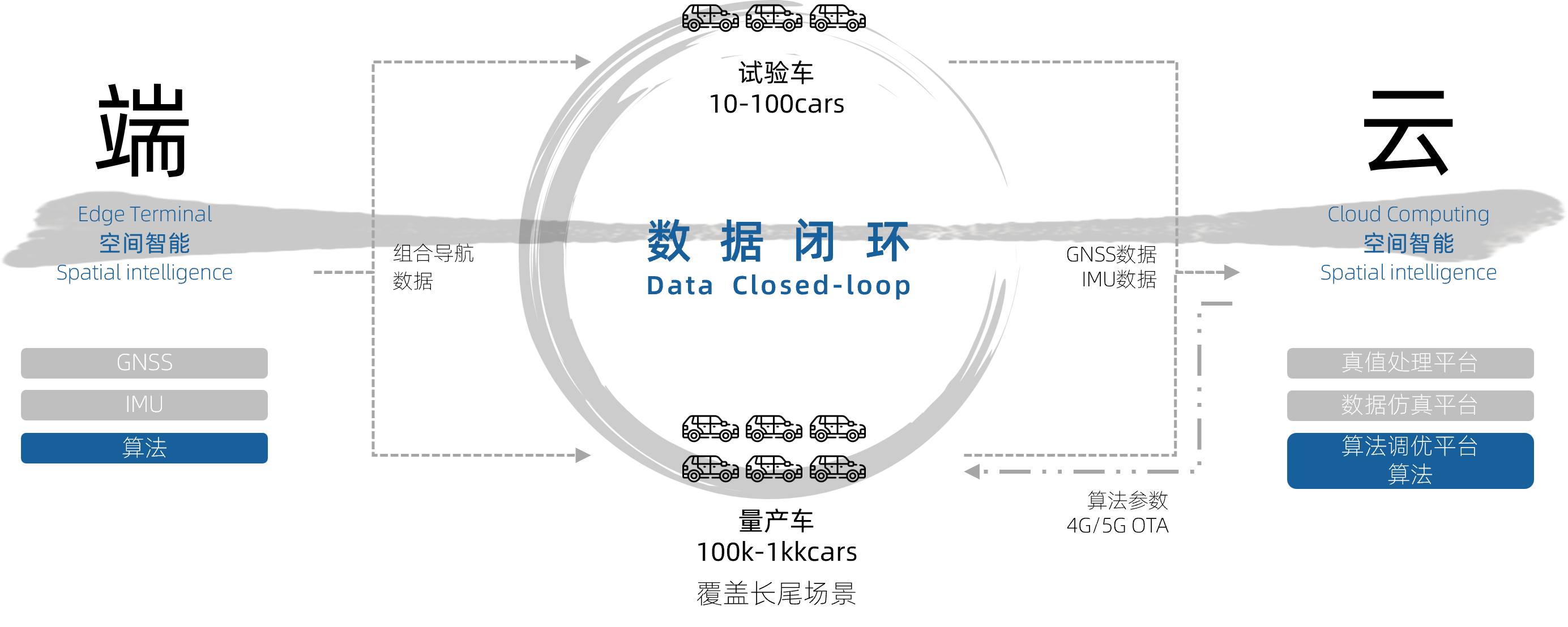
云端一体 + 数据闭环
加速智能驾驶算法迭代演进
Cloud-edge Integration + Data Closed-loop
Accelerate Iterative Evolution of Intelligent Driving Algorithms
优势1
核心底层优势
先进的技术架构和能效平台结合,保障算法的优势长期领先,具备面向未来更高级别自动驾驶拓展能力
技术架构先进
算法采用增强紧组合架构,既可以通过INS辅助PVT选星、周跳探测、整周模糊度搜索,也可以通过原始GNSS观测量信息与INS实现观测量层面的紧组合,在复杂场景下可以持续维持比较高的融合精度。
效能平台支撑快速调优
算法通过模块化、参数化设计,通过MCT的调优平台可以加速算法回归和调优,解决传统算法优化效率低、调优效果差的问题
优势2
性能优势
算法领先行业的性能优势,并覆盖更多场景的Corner Case,提升城市NOA的可用率
高可用率
空旷场景固定率超98%
复杂场景固定率达80%
收敛快
在场景切换时,算法能够在十几秒内收敛到厘米级精度(如从地下车库进入复杂场景、或者出隧道、或者摆渡船结束时 )
融合快
惯导初始化不依赖于固定解,即使在复杂场景,也不影响惯导初始化,提高NOA可用率
优势3
应用优势
算法成熟稳定,且主流硬件均已完成性能适配,可大幅降低使用的研发投入,并减少项目周期
高稳定性
算法已经过量产验证,成熟且可靠性高,在复杂场景切换时无滤波器发散问题(算法团队具备百万级以上的量产交付项目经验
项目适用性好
融合算法可以支持松组合、紧组合,同时满足不同项目的使用需求
高兼容性
算法针对主流GNSS和IMU芯片都完成了量产适配,GNSS包括ST8100/9100、F9K、M8L、MTK2735,IMU包括ASM330,SMU200,SMI240
500+
组合导航算法集模块
Integrated Navigation Algorithm Modules
3,000+
组合导航算法集参数
Integrated Navigation Algorithm Parameters
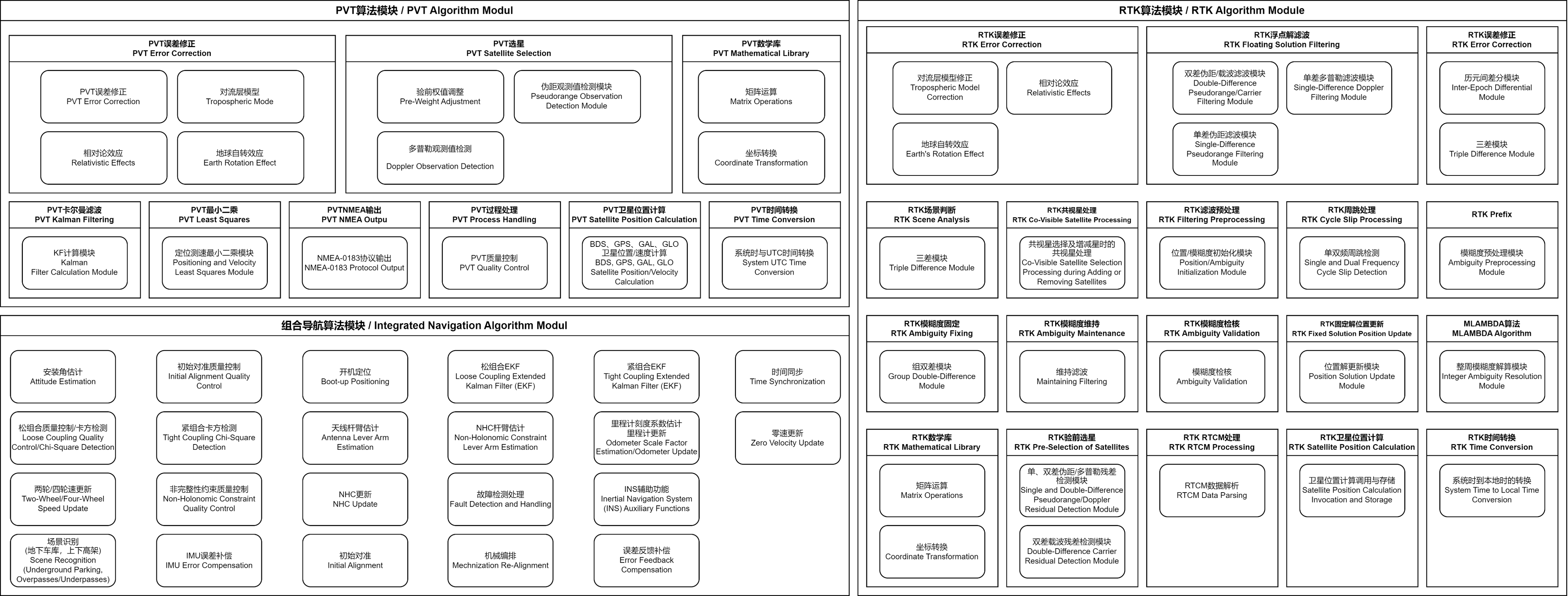
模型全
算法模型多维度规划
参数抽取详尽化,无遗漏覆盖
广覆盖
系统级架构设计,泛化能力强
覆盖众多长尾场景
多源融合
强大的异构数据处理
智能多源协同融合
高效数据同步与整
MCT 组合导航终端
IPS系列
MCT x 组合导航终端
IPS ONE
为城市NOA而生
IPS ONE 支持L2+以上的高级辅助驾驶,内含高精度GNSS、高性能IMU、车规级 MCU等主要器件,具有CAN、车载以太网等通用的标准接口。硬件搭载自研GNSS/INS多源融合算法、预期功能安全算法、多源完好性检测算法等,为车辆提供更可靠、更安全、更精准的位置、速度、姿态和时间信息。
MCT x 组合导航终端
IPS M5
全星座全频点
IPS M5 车载组合导航终端,是由高精度GNSS、高性能IMU、车规级 MCU等主要器件构成的独立硬件,支持全系统全频点和双天线定向,内置 GNSS/INS多源融合紧组合算法,具备CANFD、车载以太网、UART串口和 PPS 接口,可为车辆控制提供更可靠、更安全、更精准的位置、速度、姿态和时间信息。